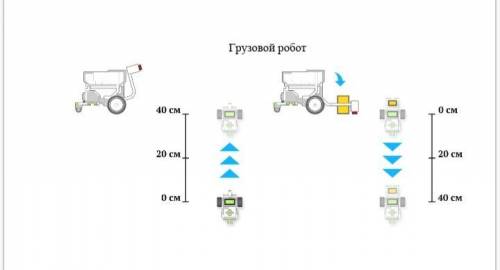
Робот делает 2 оборота вперед, опускает руку до предела вниз и прицепляет груз. В то время когда рука робота касается пола, датчик, прикрепленный к ней нажимается и после этого роботу дается команда сделать 2 оборота назад, забирая груз вместе с собой.
надо начертить схему
 софи157
2
05.02.2021 15:57
9
софи157
2
05.02.2021 15:57
9
Ответы
Показать ответы (3)
Другие вопросы по теме Информатика

 дитус
19.02.2021 15:07
дитус
19.02.2021 15:07
 pip2281
19.02.2021 15:06
pip2281
19.02.2021 15:06
 lisopat
03.12.2021 19:32
lisopat
03.12.2021 19:32
 Ясомолётик
03.12.2021 19:19
Ясомолётик
03.12.2021 19:19
 kirikuha
21.08.2019 07:50
kirikuha
21.08.2019 07:50
 assasin098
24.06.2019 21:50
assasin098
24.06.2019 21:50
 soykaalayaovpiyg
02.10.2019 22:50
soykaalayaovpiyg
02.10.2019 22:50
 lublubkoba
02.10.2019 22:50
lublubkoba
02.10.2019 22:50

Популярные вопросы
- Help me 3.Do the crossovord Буду очень благодарна ♥️☀️...
3 - ЗА НЕПРАВИЛЬНЫЙ ОТВЕТ И СПАМ В БАН!...
1 - Чем отличается мощность тока от работы тока?...
2 - написать синквейн к слову чемпион...
2 - Зар заман, зар заман, Зарлап өткен бір заман. Сөздің басы — бисмиллаһ, Біз...
1 - Товар, проданий на умовах СІF в редакції ІНКОТЕРМС-2010, виявився пошкодженим...
3 - Лаколо 200 калсама сиаверая мирол баха?...
3 - 1. Определить линейную скорость точки расположенной на расстоянии 20 см...
1 - РАСПИСАНИЕ ТЕСТОВЕ ДЗ Географія Природні зони Як відображати тести ? Списком...
2 - решить через второй замечательный предел (что в середине) заранее...
2