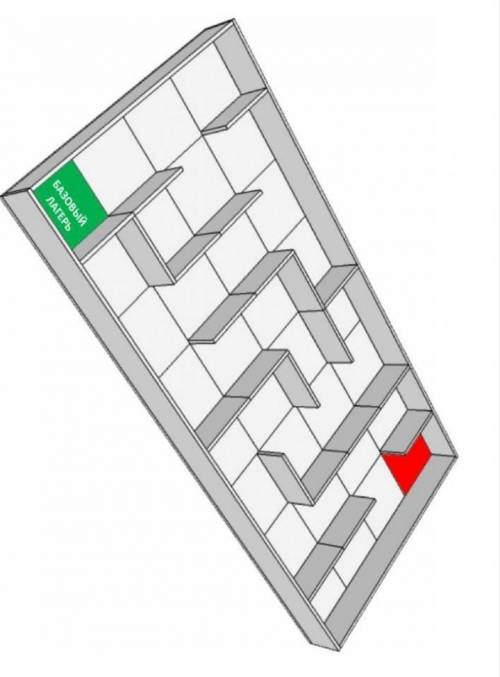
Программировании mBlock есть робот с ультразвуковым датчиком смотрящий в одну сторону(прямо). Какой порядок алгоритма для самостоятельного прохождения лабиринта.
Как уже видно на чертеже, впереди есть тупик, как можно прописать код так, чтобы робот не поехал назад в точку старта?
 Azerb1
3
26.04.2021 09:58
6
Azerb1
3
26.04.2021 09:58
6
Ответы
Показать ответы (3)
Другие вопросы по теме Информатика
 Anasteija
26.11.2021 12:02
Anasteija
26.11.2021 12:02
 stacezoloto
19.12.2022 11:45
stacezoloto
19.12.2022 11:45
 Natusya09123
29.08.2019 09:20
Natusya09123
29.08.2019 09:20
 artkeyn1
24.05.2019 04:50
artkeyn1
24.05.2019 04:50
 ALPELGOLD
24.05.2019 04:50
ALPELGOLD
24.05.2019 04:50
 Nar43
24.05.2019 04:50
Nar43
24.05.2019 04:50
 yaya4
24.05.2019 04:50
yaya4
24.05.2019 04:50
 zarina11653
24.05.2019 04:50
zarina11653
24.05.2019 04:50
 54876
24.05.2019 04:50
54876
24.05.2019 04:50

Популярные вопросы
- Твір-мініатюра на тему: Іван Мазепа як романтичний герой і реальний український...
1 - 134 * 7 ПРЕДЛОГИ Предлоги места Что соотносится? Подберите к каждой картинке...
1 - Укажіть проміжки спадання функції y=x²+4x+5 а) (-∞; 2] б) (-∞; -2] в)...
1 - Как называют руды черных металлов...
2 - МАТАН 7 КЛАСС HELPВ 1 бригаде в 3 раза больше рабочих чем во второй. Сколько...
3 - Выполнить фонетический анализ слов: 1 вариант: мягкий, ножкиФонетический...
3 - Дана правильная пирамида SABCD (S - вершина) все ребра которой равны....
1 - 5. Напишите уравнения реакций, с которых можно осу- ществить превращения...
1 - Назовите ядовитые соединения среди спиртов и фенолов...
1 - Дидактический материал 7 класс Ладыженская номер 54...
3