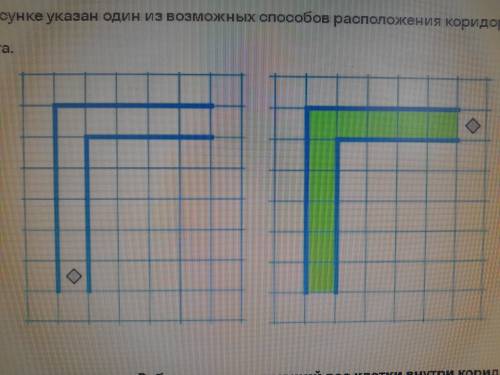
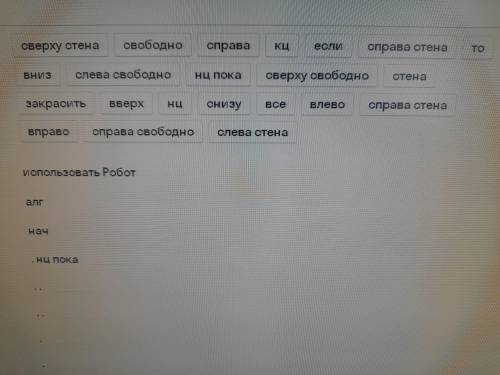
На бесконечном поле имеется вертикальный коридор. Длина его неизвестна. От верхнего края вертикального коридора отходит горизонтальный коридор также неизвестной длины. Точное направление поворота коридора. На рисунке указан один из возможных расположения коридора и робота. дополни алгоритм для робота, закрашивающий все клетки коридора. Алгоритм должен одинаково правильно, сработать как для коридора, поворачивающего направо, так и для коридора, поворачивающего налево.
использовать Робот
алг
нач
.нц пока ___
..
..
. ___
. ___ ___ ___
... ___ ___
закрасить
...кц
..иначе
... ___ пока сверху ___
закрасить
...кц
. ___
кон
 kirilzz623
3
17.02.2022 18:37
393
kirilzz623
3
17.02.2022 18:37
393
Другие вопросы по теме Информатика

 illaria2703
10.03.2021 14:02
illaria2703
10.03.2021 14:02
 nika12052006
10.03.2021 14:03
nika12052006
10.03.2021 14:03
 annamoz2004
10.03.2021 14:05
annamoz2004
10.03.2021 14:05
 diassssssss
10.03.2021 14:08
diassssssss
10.03.2021 14:08
 vasilzuk
10.03.2021 14:09
vasilzuk
10.03.2021 14:09
 сашенька062
10.03.2021 14:09
сашенька062
10.03.2021 14:09
 алка689338
10.03.2021 14:10
алка689338
10.03.2021 14:10
 GETRRRR
10.03.2021 14:10
GETRRRR
10.03.2021 14:10

Популярные вопросы
- Бабушка своим внукам послала 4 ящика яблок а племяникам 3 таких же ящика всего...
2 - Добрый день, нам с ! не можем с дочей понять! 1/1*2+1/2*3+1/3*4++1/49*50...
2 - Старый будильник отстает на 12 мин за каждые 18 часа. на сколько минут надо...
3 - Верно ли высказывание если стороны параллелограмма равны , то этот параллелограмм...
3 - Выпишите 10 заимствованных языке слов , составьте сложгые предложения с двумя...
1 - От школы до спортивного зала 1км. по парку нужно пройти 9/100 этого расстояния,...
1 - Земля вращается вокруг а) своей оси с запада на восток б)своей оси с востока...
2 - Найдите в ниже списке признаки , характеризующие постиндустриальное общество....
3 - 5признаков морального долга из мультфильмов и ....
2 - Понидің досы абай 36 секунд ішінде қанша метр жүрсе, пони 1 сағат ішінде сонша...
1
1. Начать движение вперед.
2. Если сверху есть стена, остановиться и закрасить текущую клетку.
3. Двигаться вправо до тех пор, пока сверху нет стены.
4. Если сверху есть стена, остановиться и закрасить текущую клетку.
5. Повернуться на 180 градусов.
6. Проверить, есть ли стена справа.
7. Если справа есть стена, повернуться направо и продолжить движение вперед.
8. Если справа нет стены, повернуться налево и продолжить движение вперед.
9. Повторять шаги 2-8 до тех пор, пока не достигнута нижняя граница поля.
Обоснование алгоритма:
- Начиная с верхнего края вертикального коридора, робот движется вниз и закрашивает клетки коридора.
- Двигаясь вправо до тех пор, пока сверху нет стены, робот закрашивает все клетки горизонтального коридора.
- После достижения стены слева робот поворачивается на 180 градусов и проверяет, есть ли стена справа.
- Если справа есть стена, это означает, что коридор поворачивает направо, и робот продолжает двигаться вперед.
- Если справа нет стены, это означает, что коридор поворачивает налево, и робот поворачивается налево и двигается вперед.
- Таким образом, робот продолжает закрашивать все клетки коридора, независимо от его направления поворота.