Мы начинаем с полного незнания положения робота. Желтая корзина - это барьерная корзина. Робот не может ни начать с этого бункера, ни добраться туда. У нашего робота есть датчик цвета, который определяет цвета в соответствии с этими вероятностями: • Если робот находится в КРАСНОМ бункере, датчик будет показывать КРАСНЫЙ цвет в 80% случаев, ЗЕЛЕНЫЙ - в 10% и СИНИЙ - в 10%.
• Если робот находится в ЗЕЛЕНОМ бункере, датчик будет показывать ЗЕЛЕНЫЙ цвет в 70% случаев, КРАСНЫЙ - в 10% и СИНИЙ - в 20%.
• Если робот находится в СИНЕЙ корзине, датчик будет сообщать о СИНЕМ цвете в 50% случаев и ЗЕЛЕНОМ в 50%.
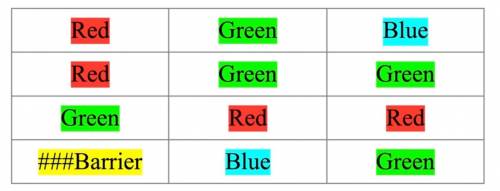
Мир не цикличен, то есть, когда робот достигает стены, он остается в этом бункере. Робот почувствовал цвет "ЗЕЛЕНЫЙ", а затем робот переместился влево, а затем вниз (движение на 100% точное).
A. Какова вероятность того, что робот почувствует сейчас "КРАСНЫЙ"?
 ruzar1987
3
25.01.2022 03:51
2
ruzar1987
3
25.01.2022 03:51
2
Ответы
Показать ответы (3)
Другие вопросы по теме Информатика
 imrangaraev00
28.04.2020 18:29
imrangaraev00
28.04.2020 18:29
 ajamshid1976p042ct
28.04.2020 18:29
ajamshid1976p042ct
28.04.2020 18:29
 KatarinaDip
28.04.2020 18:29
KatarinaDip
28.04.2020 18:29
 Arttfggg
28.04.2020 18:28
Arttfggg
28.04.2020 18:28

 habital
28.04.2020 18:28
habital
28.04.2020 18:28
 elyakhina1976
28.04.2020 18:28
elyakhina1976
28.04.2020 18:28
 Karjal
28.04.2020 18:27
Karjal
28.04.2020 18:27
 Sanya055
28.04.2020 18:27
Sanya055
28.04.2020 18:27

Популярные вопросы
- Как поступить ребёнку давно не видевшего бабушку, а сейчас она пренесла инсульт...
2 - 1. за каждое попадание в тире семен получал шесть дополнительных пуль. всего...
3 - Из d лежащий внутри угла а опушены перпендикуляры db и dc на стороны угла.докажите...
1 - Составь диалог про проблемы росии на языке. 15 маленький...
2 - Зсеми варіантів відповідей оберіть три правильні. 1 головна ідея роману «чорна...
1 - Четырехзначное число 545a дает 6 в остатке при делении на 8. найдите остаток...
3 - Используя дополнительные источники, подготовьте биографический очерк о ф.ф.ушаков.докажите...
2 - Составьте предложение используя слова недоброжелательно-враждебно....
1 - X^2-2 (a-1)x-2a+1=0 один корень положительный, другой отрицательный...
2 - Знайдіть різницю 16 год 26 хв – 9 год 52 хв.? а) 6 год 26 хв; б) 7 год 34 хв;...
1