
Другие вопросы по теме Информатика
 Arkadop
07.08.2019 17:30
Arkadop
07.08.2019 17:30
 yulyatigayali
07.08.2019 17:30
yulyatigayali
07.08.2019 17:30
 fogeimof
22.04.2020 12:56
fogeimof
22.04.2020 12:56
 Egorkalyadov03
23.01.2020 11:02
Egorkalyadov03
23.01.2020 11:02
 Dinochka99
23.01.2020 11:00
Dinochka99
23.01.2020 11:00

 marta4563556
23.01.2020 10:57
marta4563556
23.01.2020 10:57
 Алина777начарова
14.12.2020 23:05
Алина777начарова
14.12.2020 23:05
 duyquhuseynli11
14.12.2020 23:05
duyquhuseynli11
14.12.2020 23:05

Популярные вопросы
- 5. 1) Составьте задачу по рисунку и решите её:Коли- Объём бен-Объём бензина водной...
2 - с химией Как изменится скорость прямой реакции в системе Fe2O3 (т) + 3Н2 (г)...
1 - Установіть правильну послідовність структур рефлекторної дуги слиновидільного...
2 - У треугольника ABC =90 градусов; AB =4 см; АС = 2 √ 3...
1 - Розробіть програму для розв’язання рівняння х2-5/а=б користувач вводить параметри...
3 - очень нужно , не могу решить . Сделаю ответ лучшим !...
1 - Всем привет) 4. Практическая работа. Задание: в данных предложениях выделить...
3 - 1.Напишите общийчлен последовательности,натуральных чисел,каждое из которыхпри...
3 - Вставьте герундий и предлог(если обязательно) 1. Ursula tried to warm the girl´s...
2 - Які види робіт виконують річки? (перерахуйте)...
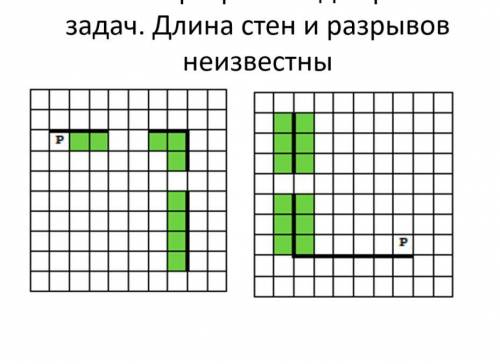
2
Для решения данной задачи, нам необходимо составить алгоритм, который будет выполнять указанный на рисунке цикл робота. Давайте пошагово разберемся в задаче и составим подробный алгоритм.
1. Первый шаг:
- Робот начинает движение с позиции 1 и ориентирован вверх.
- Роботу нужно сделать 3 шага вперед.
- По окончании 3 шагов, робот достигает позиции 2 и остается ориентированным вверх.
2. Второй шаг:
- Робот должен сделать поворот налево на 90 градусов.
- По окончании поворота, робот остается на позиции 2 и ориентирован влево.
3. Третий шаг:
- Роботу нужно сделать 2 шага вперед.
- По окончании 2 шагов, робот достигает позиции 3 и остается ориентированным влево.
4. Четвертый шаг:
- Робот должен сделать поворот налево на 90 градусов.
- По окончании поворота, робот остается на позиции 3 и ориентирован вниз.
5. Пятый шаг:
- Роботу нужно сделать 3 шага вперед.
- По окончании 3 шагов, робот достигает позиции 4 и остается ориентированным вниз.
6. Шестой шаг:
- Робот должен сделать поворот налево на 90 градусов.
- По окончании поворота, робот остается на позиции 4 и ориентирован вправо.
7. Седьмой шаг:
- Роботу нужно сделать 2 шага вперед.
- По окончании 2 шагов, робот достигает позиции 5 и остается ориентированным вправо.
8. Восьмой шаг:
- Робот должен сделать поворот налево на 90 градусов.
- По окончании поворота, робот остается на позиции 5 и ориентирован вверх.
9. Девятый шаг:
- Роботу нужно сделать 4 шага вперед.
- По окончании 4 шагов, робот достигает позиции 6 и остается ориентированным вверх.
Вот и всё! Мы составили подробный алгоритм для данного цикла робота. Пожалуйста, обратите внимание, что в алгоритме используются команды "шаг вперед", "поворот налево на 90 градусов" и указания позиции, куда робот должен переместиться и куда он должен быть ориентирован после выполнения каждого шага. Следуя этому алгоритму, робот выполнит указанный цикл.