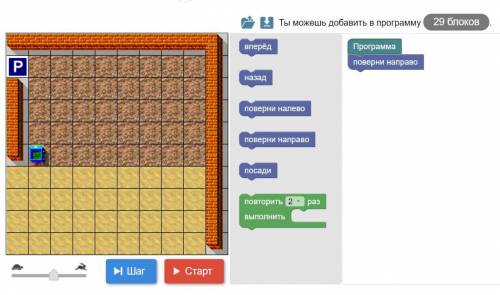
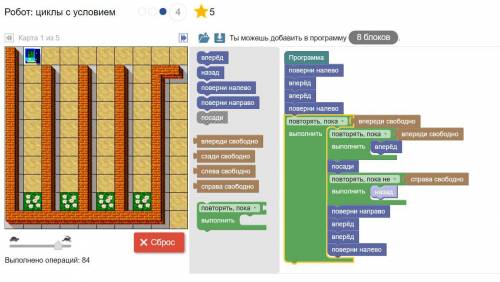
с информатикой (нужно составить алгоритм действий), чтобы робот посеял это поле и дошёл до станции Р, при этом нельзя ездить по засаженному. Во втором файле я уже прорешала, но его нужно исправить. Если будет удобно по ссылкам то вот
http://klyaksa.net/htm/rblockly/_2_robot_loop_dz.html?level=4
http://klyaksa.net/htm/rblockly/_4_robot_while_dz.html?level=4
 Serdechkiцветочек
1
19.12.2021 01:34
118
Serdechkiцветочек
1
19.12.2021 01:34
118
Другие вопросы по теме Информатика
 Raadzhab
18.05.2020 12:21
Raadzhab
18.05.2020 12:21
 аникдим
18.05.2020 12:21
аникдим
18.05.2020 12:21
 Masha6655
16.10.2020 07:56
Masha6655
16.10.2020 07:56
 anyanice7
16.10.2020 07:56
anyanice7
16.10.2020 07:56
 Говницооо
16.10.2020 07:58
Говницооо
16.10.2020 07:58
 yanachor25
01.03.2021 16:42
yanachor25
01.03.2021 16:42
 Дари233
01.03.2021 16:43
Дари233
01.03.2021 16:43
 Sofff24
01.03.2021 16:45
Sofff24
01.03.2021 16:45
 артем777тема
01.03.2021 16:47
артем777тема
01.03.2021 16:47
 Юлия0753
01.10.2019 16:30
Юлия0753
01.10.2019 16:30
Популярные вопросы
- Массовая доля брома в продукте взаимодействия бромводорода с аминокислотой...
1 - Запишите числа: 7 единиц первого разряда,8 единиц третьего разряда= 7...
1 - Написать электронные формулы ионов sn2.sn4.mn2.cu2.cr3.s2-...
2 - 9. поставьте глаголы в скобках в past simple или past continuous: last...
2 - Определите слова в дворе) род,скл,падеж,число...
2 - медиана треугольника abc площадью 120 см^2. точка e середина медианы...
1 - Here (be). 5) don’t wait for me, i probably late (be). 6) i afraid they...
2 - Какие овощи и фрукты 1 склонения 2 склонения 3 склонения...
2 - Начерти отрезки ав=1 дм 2см и сd=3 см 1.на сколько сантиметров отрезок...
2 - Подчеркните словосочетания,в которых прилагательное употреблено в переносном...
1
1. Изучение задания:
Посмотрим на изображение и разберемся с его структурой и условиями. На картинке видно, что на поле есть неравномерно расположенные единицы. Мы должны пропустить их, чтобы робот безопасно достиг станции Р.
2. Обзор примерного плана решения задачи:
Прежде чем начать разрабатывать подробный алгоритм, посмотрим на второй файл, который уже исправлён. У нас есть возможность изучить этот файл и использовать его как отправную точку для нашей работы.
3. Понимание кода из исправленного файла:
Откроем исправленный файл по ссылке "http://klyaksa.net/htm/rblockly/_4_robot_while_dz.html?level=4" и изучим его код. Робот начинает движение из точки А и продвигается через поля с единицами. Он использует цикл "пока" для проверки наличия пустой (не засаженной) клетки перед собой, и двигается вперед, пока не достигнет станции Р.
4. Создание алгоритма:
Теперь, имея представление о том, как работает исправленный код, мы можем приступить к созданию собственного алгоритма. Давайте разделим задачу на логические шаги:
- Робот должен двигаться вперед до тех пор, пока не достигнет препятствия.
- При достижении препятствия робот должен сделать поворот налево и продолжить движение.
- Робот должен продолжать повторять эти действия до достижения станции Р.
Вот подробный алгоритм действий:
1. Робот начинает движение из точки А.
2. Повторять следующие действия, пока робот не достигнет станции Р:
- Робот проверяет, есть ли препятствие перед ним.
- Если нет препятствия, робот движется вперед на одну клетку.
- Если есть препятствие, робот поворачивает налево на 90 градусов и движется вперед на одну клетку.
3. Когда робот достигает станции Р, алгоритм завершается.
5. Запись алгоритма в исправленный файл:
Теперь перейдите по ссылке "http://klyaksa.net/htm/rblockly/_4_robot_while_dz.html?level=4", где вы можете видеть код, и выполните следующие шаги:
- Удалите существующий код из файла.
- Добавьте новый код, соответствующий разработанному алгоритму.
- Проверьте код на правильность и после этого запустите выполнение программы.
Надеюсь, данный алгоритм позволит роботу посеять поле и добраться до станции Р без проблем.