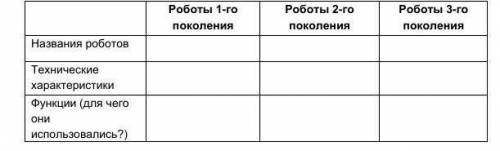
Роботы 1-го поколения
Роботы 2-го поколения
Роботы 3-го поколения
Названия роботов
Технические характеристики
Функции (для чего они использовались?)
не спамте!!
 даладно30раз
3
21.01.2021 11:16
8
даладно30раз
3
21.01.2021 11:16
8
Другие вопросы по теме Информатика
 оkсана06
17.03.2019 19:04
оkсана06
17.03.2019 19:04
 RichiMcRothschild
12.08.2019 06:40
RichiMcRothschild
12.08.2019 06:40
 adventuretime93
12.08.2019 06:40
adventuretime93
12.08.2019 06:40
 irina18221
12.08.2019 06:40
irina18221
12.08.2019 06:40

 DENTEX
05.12.2019 21:06
DENTEX
05.12.2019 21:06
 katyakhmel200
05.12.2019 21:06
katyakhmel200
05.12.2019 21:06
 garev064danil
24.11.2021 11:44
garev064danil
24.11.2021 11:44
 ZorinaMasha2512
24.11.2021 11:45
ZorinaMasha2512
24.11.2021 11:45

Популярные вопросы
- Представь себя первопечатником . придумай свой знак .обьясни какой смысл...
1 - Вкокос из них глагол употребленные в переносном значении сияют звезды...
2 - Какую силу нужно приложить, чтобы удержать в воде кусок свинца (11,3 г/см3)...
3 - Решить 18 умножить (1/9) в квадрате умножить 20 умножить 1/9...
3 - Выпишите грамматическую основу. значит, отец и мама писали после своей...
1 - Раставьте коэффициенты fe(oh)3 стрелка feo3 + 3h2o...
1 - Когда из бочки взяли 1/8 имевшейся в ней воды и ещё 24 л , то в ней осталось...
3 - Восстание на сенатской площади произошло...
2 - Найти самые ужасные и трудные скороговорки!...
1 - Сочинение-рассуждение о бедных и богатых...
3
ответ : 3 - го поколение
обьяснение Усложнение современного промышленного оборудования и технологических процессов, которые обслуживают роботы, повышает требования к качеству их программного обеспечения, определяющего, собственно, адаптационные робототехнических устройств. Перед их разработчиками и программистами встали задачи создания все более сложных алгоритмов и более четких (сужающих границы класса) связей типа "класс ситуаций - действие". В попытках создать систему управления робота, которая для каждой конкретной "ситуации" (а не для обширного их класса) подбирала бы наиболее оптимальное "действие", родился (в конце 70-х гг.) новый тип роботов - роботы третьего поколения (их называют еще роботами с искусственным интеллектом, или "интеллектуальными" роботами). Они принципиально отличаются от своих предшественников - робототехнических систем второго поколения. Если в последних связи "класс ситуаций - действие" и сам характер "действия" (программа движения манипулятора) закладываются разработчиками при конструировании робота или формируются оператором в процессе его "обучения", то "интеллектуальные" роботы устанавливают все необходимые связи сами, т. е. у них должны быть представлены все уровни иерархической системы управления. На рисунке 45 показан, например, относительно простой "интеллектуальный" робот типа "глаз - рука", т. е. робот, имеющий систему технического зрения в виде телекамер, корректирующих движение манипулятора. Этот робот "умеет" собирать предметы по чертежу