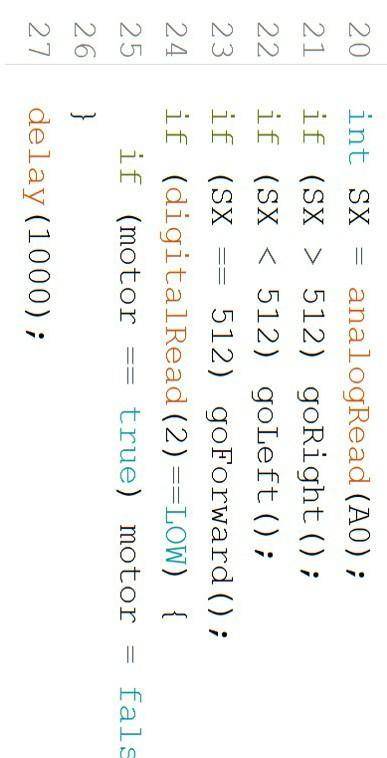
Продолжая работать с джойстиком, наш юный разработчик заметил, что робот-аватар очень плохо управляется, хотя джойстик был подключен совершенно правильно (сенсор оси X – к пину А0, а кнопка – к пину 2). Вот часть его программы (рис. 9.1), отвечающая за управление аватаром:

Рис. 9.1.
Что же он хотел сделать?
Управление включением и выключением мотора аватара поочередным нажатием на кнопку джойстика (и только этой кнопкой!).
Если ручка отклонена, то аватар движется в указанную сторону.
Если ручка не отклонена, то аватар движется прямо.
Проанализируйте код и укажите возможные причины того, что аватар плохо или неправильно управляется (каждое утверждение не зависит от других и относится ко всему приведенному коду без всяких допущений).
Выберите все подходящие ответы из списка
В среднем положении ручки результат analogRead() отличается от 512.В функциях движения goRight, goLeft и goForward не обрабатывается переменная motor, отвечающая за то, подается питание на мотор или нет.В операторах условия, использующихся для задания движения влево и вправо, выбрано значение, совпадающее с центральным положением ручки, в результате даже прикосновение к ручке приводит к вилянию аватара.Не организована защита от дребезга кнопки, в результате чего даже чрезвычайно краткое нажатие приводит к постоянному включению и выключению мотора.Значение задержки после обработки джойстика очень большое и аватар слишком медленно и нечетко отрабатывает команды.
 mgatron
1
21.10.2020 14:48
0
mgatron
1
21.10.2020 14:48
0
Ответы
Показать ответы (3)
Другие вопросы по теме Информатика
 theslomsmon
19.05.2020 07:46
theslomsmon
19.05.2020 07:46
 yulyashka01
19.05.2020 08:21
yulyashka01
19.05.2020 08:21

 ekimmail631
05.06.2019 23:50
ekimmail631
05.06.2019 23:50
 volkovaw
05.06.2019 23:50
volkovaw
05.06.2019 23:50
 хамзикош
08.12.2021 04:22
хамзикош
08.12.2021 04:22
 vasilarina06
08.12.2021 04:24
vasilarina06
08.12.2021 04:24
 zox229
08.12.2021 04:28
zox229
08.12.2021 04:28
 YAMAHAv
08.12.2021 04:58
YAMAHAv
08.12.2021 04:58

Популярные вопросы
- Определите какие это предложения по наличию грамматической основы...
2 - In an ideal school revision ) part of every day learning.at the end...
1 - Господи,хелп вообще не шарю4 и 5...
1 - Природные условия оказывают огромное влияние на размещение населения....
1 - Изобразите произвольный многогранник обозначьте его вершины и перечислите...
3 - С,простите за формат по другому не влезает...
1 - Сложите 7/3 числа 21 и 6/5 числа 60...
3 - Complete the dialogue a: did 1) you can still buy body parts from...
3 - Объясните, , как это решить не подбором....
1 - Please, help! кто может разбить число 436 на части, обратно пропорциональные...
1