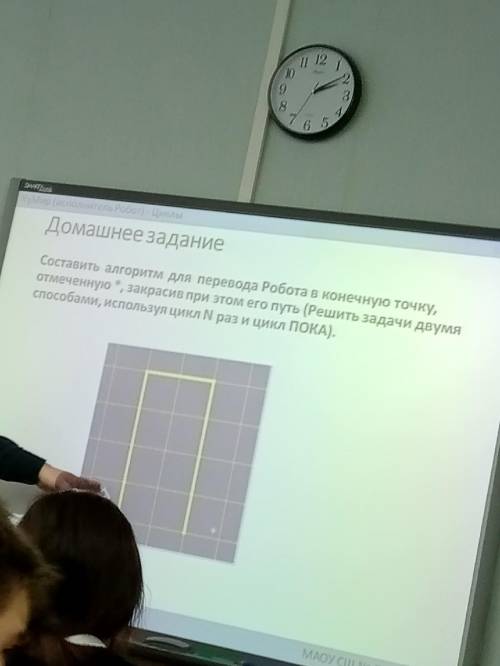
Cоставить алгоритм для перевода Робота в конечную точку, отмеченную *, закрасив при этом его путь (Решить задачу двумя используя цикл N раз и цикл ПОКА)
 Farpli
1
15.02.2021 20:57
201
Farpli
1
15.02.2021 20:57
201
Другие вопросы по теме Информатика
 alenka1408
31.08.2019 05:40
alenka1408
31.08.2019 05:40
 kekocikkkkk
31.08.2019 05:40
kekocikkkkk
31.08.2019 05:40
 Daniluha29
09.04.2020 12:10
Daniluha29
09.04.2020 12:10
 FlowerBlue17
09.04.2020 12:10
FlowerBlue17
09.04.2020 12:10
 влад2610
09.04.2020 12:09
влад2610
09.04.2020 12:09
 наташа934
09.04.2020 12:07
наташа934
09.04.2020 12:07
 59494920948583
04.09.2019 15:20
59494920948583
04.09.2019 15:20
 qwer54321asdfrewq
04.09.2019 15:20
qwer54321asdfrewq
04.09.2019 15:20
 lavira3
04.09.2019 15:30
lavira3
04.09.2019 15:30

Популярные вопросы
- Вставьте пропущенное слово в предложении...
2 - Где тут правильные и неправильные глаголы Cambridge to study medicine....
2 - Таблица AБB.3KН000)о с домашкойОООхоу1) Раскодируйте, используя таблицу...
3 - Если угол прямой, то вертикальный с ним прямой? ...
1 - Ребёнку 4,5 месяца. его вес равен 5400г. какой должен быть его суточный...
1 - Выполните задание Перепутанные логические цепочки . Восстановите правильную...
3 - Запишіть п ять дієслів, утворених суфіксальним треба...
3 - 1. Қандай жануарлар тез жүгіреді? 2. Қай жануарды халық бағбан деп...
3 - Процес, у якому одна проведена реакція викликає подальші реакції такого...
3 - Задание 14 заранее Берндершш...
3
1. Изначально Робот должен находиться в начальной точке (обозначенной буквой А на рисунке).
2. Нам нужно определить направление движения Робота. В данном задании возможны два направления - влево (на запад) и вниз (на юг).
3. Составим алгоритм с использованием цикла "N раз". Предположим, что число N указано в задаче.
3.1. Установим счетчик цикла в значение 1.
3.2. Запустим цикл N раз.
- Если Робот стоит в точке, отмеченной *, то закончим алгоритм.
- Если Робот может двигаться в выбранном направлении без ограничений, то двинемся в этом направлении и перекрасим текущую клетку. Затем увеличим счетчик цикла на 1 и вернемся к шагу 3.2.
- Если Робот не может двигаться в выбранном направлении (например, влево), то изменяем направление движения на 90 градусов по часовой стрелке. Затем увеличим счетчик цикла на 1 и вернемся к шагу 3.2.
4. Если алгоритм с циклом "N раз" не дает решения (Робот не достигает конечной точки), то можно использовать алгоритм с циклом "ПОКА".
4.1. Пока Робот не достигнет конечной точки (отмеченной *), выполняем следующие действия:
- Если Робот может двигаться в выбранном направлении без ограничений, то двинемся в этом направлении и перекрасим текущую клетку.
- Если Робот не может двигаться в выбранном направлении (например, влево), то изменяем направление движения на 90 градусов по часовой стрелке.
5. Когда Робот достигнет конечной точки (отмеченной *), останавливаем алгоритм.
Этот алгоритм позволяет Роботу двигаться по клеткам, закрашивая их путь, и прийти в конечную точку. Алгоритм использует цикл "N раз", чтобы ограничить количество шагов, или цикл "ПОКА", чтобы продолжать движение до достижения цели.