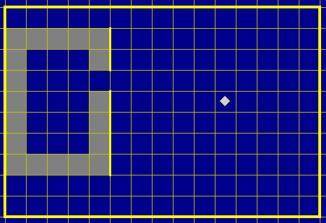
2.Где-то в поле Робота находится вертикальная стена с отверстием в одну клетку, размеры которой неизвестны. Робот из произвольной клетки справа от стены, но обязательно напротив нее, должен дойти до стены и закрасить клетки за стеной, как показано на рисунке.
 korolinkot
3
12.01.2021 12:14
190
korolinkot
3
12.01.2021 12:14
190
Другие вопросы по теме Информатика
 elinamar
31.07.2019 22:40
elinamar
31.07.2019 22:40
 yulyaanisimova2
02.02.2022 07:25
yulyaanisimova2
02.02.2022 07:25
 daniladremov
02.02.2022 07:39
daniladremov
02.02.2022 07:39
 натуся103
09.08.2019 22:07
натуся103
09.08.2019 22:07
 top76543211vfjo
10.08.2019 01:10
top76543211vfjo
10.08.2019 01:10
 r27121983
10.08.2019 01:10
r27121983
10.08.2019 01:10
 nastyaborisova13
10.08.2019 01:20
nastyaborisova13
10.08.2019 01:20
 TemhenkoShasa
10.08.2019 01:20
TemhenkoShasa
10.08.2019 01:20
 Alya9let
10.08.2019 01:20
Alya9let
10.08.2019 01:20

Популярные вопросы
- Упрямокутному паралелепіпеді діагональ дорівнює а і нахилена до площини...
3 - Информатика : вставь пропушеные слова: 1) назначение операционной системы...
2 - Ваня петя и олег собирали грибы.ваня насобирал 6, 5 кг грибов, петя насобирал...
1 - Брусок под действием силы 2н перемещается на 50 см. какая при этом совершается...
3 - над полями морфологический разбор слова .скажите 29...
2 - 11. в какой строке все слова являются частицей? 1. вон, из-за, бы 2. вот,...
1 - Aletter from holiday - портфолио dear . our hotel ……………………… . this evening...
3 - Загадка 1 человек ходит на 4 ножках второй на 2 ножках а 3 на 3 ножках я...
2 - Учение «стригольников» включало в себя: выберите несколько из 5 вариантов...
2 - Разложи на множители s^2−r^2−8s+16 !...
3
1. Если мы не знаем размеры отверстия, то можем использовать радиус движения робота. Предположим, что радиус движения робота составляет 3 клетки. Тогда робот может пройти следующим образом:
- Сначала робот должен двигаться влево до тех пор, пока не столкнется со стеной. После этого он поворачивает направо и начинает двигаться вниз.
- Робот продолжает двигаться вниз до тех пор, пока его «нос» (точка, находящаяся справа от робота) не будет находиться напротив отверстия в стене.
- Когда робот достигает отверстия, он должен закрасить клетки за стеной. Для этого он продолжает двигаться вниз до тех пор, пока не достигнет нижней границы поля.
2. Если мы знаем размеры отверстия, то можем использовать это знание в решении задачи. Пусть ширина стены составляет 4 клетки. Тогда робот может пройти следующим образом:
- Робот начинает движение так же, как и в предыдущем варианте, двигаясь влево до тех пор, пока не столкнется со стеной. После этого он поворачивает направо и начинает двигаться вниз.
- Робот продолжает двигаться вниз до тех пор, пока его «нос» не будет находиться на расстоянии 3 клеток от левой границы стены (ширина стены минус 1 клетка).
- Теперь робот знает, что отверстие находится на расстоянии 3 клеток от его текущего положения. Он может сделать шаг влево и продолжить движение вниз до нижней границы поля.
Таким образом, в зависимости от известной или неизвестной ширины стены, робот может использовать разные стратегии для достижения цели. В обоих случаях робот должен начать движение справа от стены и последовательно двигаться влево и вниз, чтобы добраться до отверстия и закрасить клетки за стеной.